
Układy automatycznej regulacji
Wzrost mocy obliczeniowej urządzeń cyfrowych, które realizują sterowanie procesami, spowodował, że pojawiła się możliwość wykorzystania sterowników PLC w układach sterowania ze sprzężeniem zwrotnym. Zadaniem sterownika w takich układach staje się realizacja odpowiednich algorytmów regulacji.
Sterowaniem w układzie automatycznej regulacji (UAR) związanym z realizacja procesów przemysłowych, nazywamy celowe oddziaływanie na przebieg procesu w celu utrzymania założonych parametrów procesu. Sterowanie samoczynne zapewnia wymaganą zmienność jednej lub kilku wielkości charakteryzującej proces według ustalonego algorytmu sterowania.
Struktura sterowania układu UAR, w którym odbywa się sterowanie według powyższej definicji przedstawiona jest na rysunku 2.15.
Rysunek 2.15. Struktura blokowa UAR.
Zadaniem regulatora jest naprowadzenie wielkości wyjściowej „y" obiektu regulacji „O" na poziom określony przez wielkość zadaną „W" i utrzymanie jej na zadanym poziomie, przeciwdziałając wielkości zakłócającej „z". Wielkości wyjściowa obiektu „y" porównywana jest zatem z wielkością zadaną „w" . Różnica e = w - y uwzględniana jest w algorytmie działania regulatora i przetwarzana na wielkości nastawiającą „x". Wielkość nastawiająca „x" wpływa bezpośrednio lub pośrednio (za pośrednictwem elementów wejściowych procesu) na obiekt regulacji „O".
Sterownik PLC umożliwia implementacje w swojej strukturze algorytm regulacyjny o działaniu dyskretnym. Staje się, zatem regulatorem programowym , gdzie algorytm regulatora wprowadza użytkownik sterownika.
Typy regulatorów
Poprawne działanie układu regulacji zależy od doboru odpowiedniego typu regulatora do sterowanego obiektu. Przyjęty typ regulatora określa zasadę regulacji, tzn. zależność wiążącą sygnał odchyłki e z sygnałem sterującym u. W regulatorach ciągłych ta zależność opiera się na proporcjonalności, całkowaniu i różniczkowaniu odchyłki e.
Najczęściej stosowane w praktyce typy regulatorów to:
Regulator proporcjonalny P
 (13)
(13)
 (14)
(14)
Regulator całkujący I
![]() (15)
(15)
 (16)
(16)
Regulator proporcjonalno – całkujący PI
![]() (17)
(17)
 (18)
(18)
Regulator proporcjonalno – różniczkujący PD
 (19)
(19)
 (20)
(20)
Regulator proporcjonalno – całkująco – różniczkujący PID
![]() (21)
(21)
 (22)
(22)
Współczynniki występujące w równaniach definiujących poszczególne typy regulatorów nazywa się nastawami. Nastawy mają standardowe nazwy:
kp – współczynnik wzmocnienia
Ti – czas zdwojenia
Td – czas wyprzedzenia
Oznaczenia poszczególnych typów regulatorów pochodzą od pierwszych liter angielskich nazw poszczególnych operacji (Proportional, Integration, Differentation).
W przypadku algorytmu regulatora o działaniu ciągłym reakcja regulatora polega na generowaniu na wyjściu analogowym modułu sterownika sygnału sterującego x(t) z zakresu 0-Xmax(t), będącego reakcja na zmieniający się sygnał y(t). Spotyka się realizacje regulatorów PLC o działaniu ciągłym jako regulatorów o analogowym sygnale wyjściowym (np. 0-10V DC, 0-20mA DC, 4-20mA DC).
Na podstawie zarejestrowanych charakterystyk skokowych można wyznaczyć rzeczywisty współczynnik wzmocnienia regulatora
 (23)
(23)
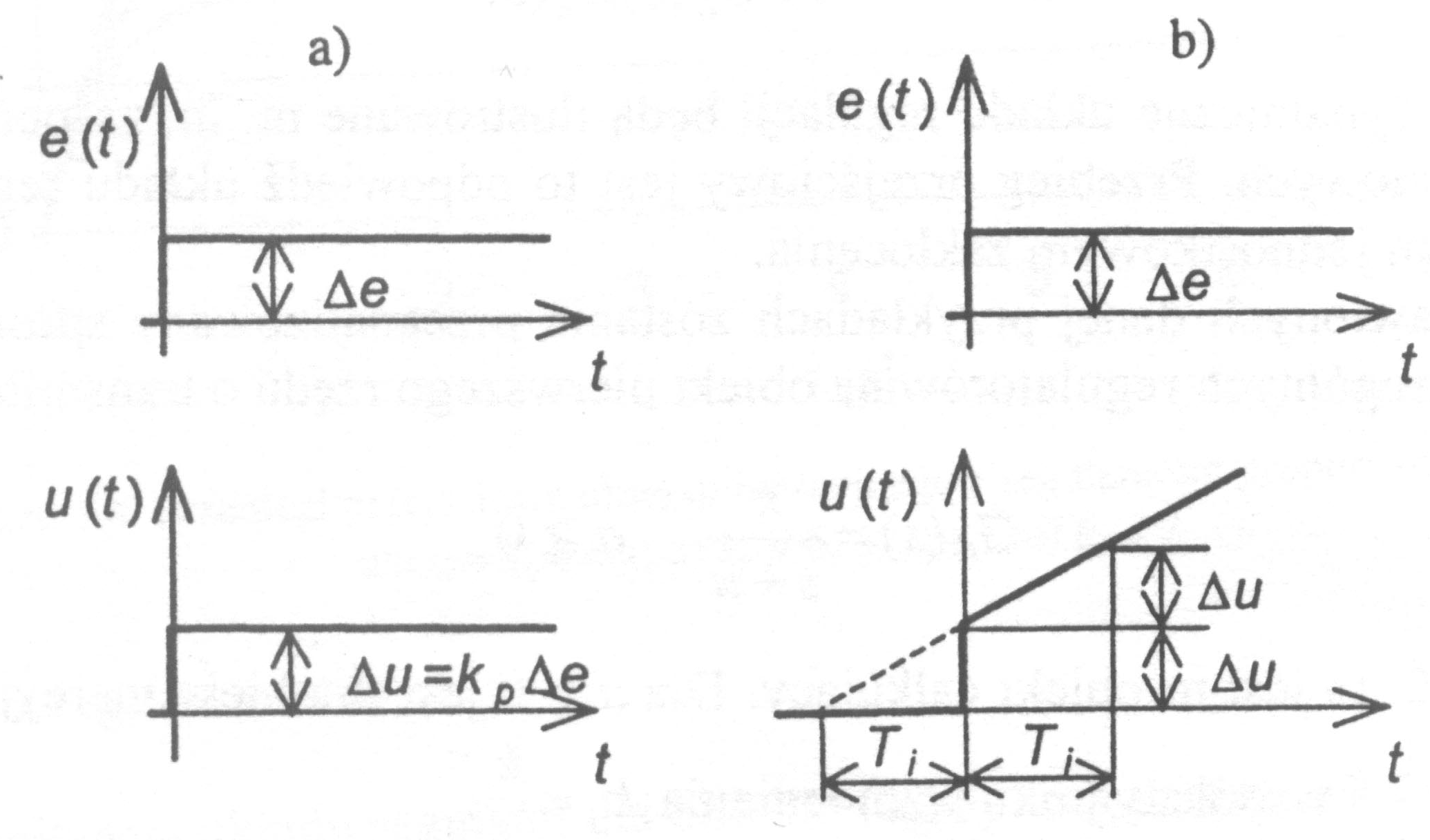
Rysunek 2.16. Charakterystyki skokowe regulatorów: a) regulator P, b) regulator PI.
Z charakterystyki skokowej regulatora PI (rysunek 2.16 b) można wyznaczyć współczynnik Ti który jest czasem od momentu zaistnienia skokowej zmiany odchyłki do chwili, gdy sygnał wyjściowy z regulatora PI osiągnie dwukrotną wartość sygnału, którą otrzymano by w regulatorze P.
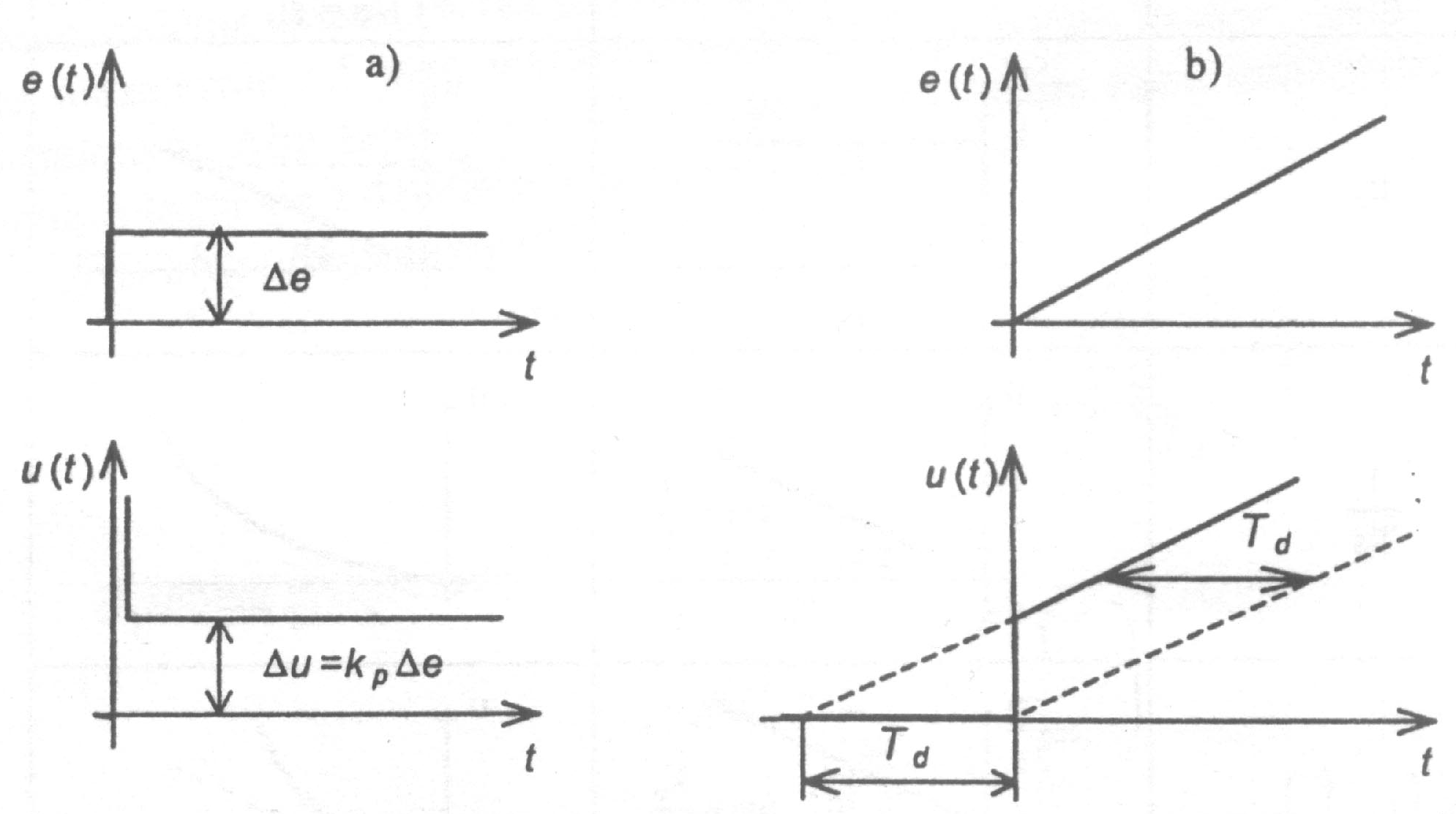
Rysunek 2.17. a) charakterystyka skokowa regulatora PD, b)odpowiedź regulatora PD na sygnał liniowo narastający.
Czas wyprzedzania Td regulatora PD można wyznaczyć z odpowiedzi na sygnał liniowo narastający. Jest to czas o jaki sygnał wyjściowy z regulatora PD wyprzedza sygnał wyjściowy z regulatora P przy liniowo narastającej zmianie odchyłki.
W praktyce trudno jest zrealizować idealne operacje różniczkowania, więc realizuje się je jako różniczkowanie z inercją.
Otrzymuje się wtedy rzeczywiste regulatory PD (24) i PID (25).
 (24)
(24)
 (25)
(25)
Zmieniając odpowiednio nastawy regulatora PID można uzyskać regulator o mniej złożonej strukturze. Na przykład jeśli przyjmie się Td = 0 oraz Ti ≈ ∞ , to otrzyma się regulator typu P.
W tabeli 3.2 zawarto zestawienie charakterystyk regulatorów przy wymuszeniu skokowym i liniowym.
Tabela 2.2. Charakterystyki regulatorów przy wymuszeniu skokowym i liniowym
Własności układów regulacji
Regulator GR(s) jest dołączony do obiektu GO(s) w pętli ujemnego sprzężenia zwrotnego. Zmienia to dynamikę oddziaływań w torze zakłócenie Z(s) – wielkość regulowana Y(s) (rysunek 2.18).
Rysunek 2.18. Transformacja układu przez dołączenie sprzężenia zwrotnego.
Transmitancja operatorowa takiego układu ma postać
 (26)
(26)
Dołączenie regulatora innego niż proporcjonalny do obiektu wiąże się ze zmianą rzędu równania różniczkującego opisującego cały układ. W przypadku obiektów z regulatorem typu I oraz PI rząd całego układu wzrasta o jeden. Oznacza to pojawienie się oscylacji w torze wyjściowym obiektu. Współczynnik tłumienia tych oscylacji zależy od wartości nastaw regulatorów.
Dla regulatora typu I współczynnik tłumienia oscylacji wyrażony jest równaniem
 (27)
(27)
gdzie a jest stałą dodawaną w mianowniku równania operatorowego opisującego obiekt pierwszego rzędu (patrz równanie (28))
 (28)
(28)
jeśli współczynnik ten jest równy zero, to układ jest niestabilny, a oscylacje mają stałą amplitudę.
W przypadku regulatora PI współczynnik tłumienia oscylacji (27) jest większy od jedności. Cały układ ma własności członu inercyjnego z różniczkowaniem, po skokowej zmianie zakłócenia osiągnie on ten sam punkt równowagi, w którym był przed zakłóceniem, lecz bez oscylacji.
Dobór nastaw regulatorów
Przy dobieraniu wartości nastaw najważniejszym wymaganiem jest zapewnienie stabilności układu, tzn. że po pobudzeniu stałym niezerowym sygnałem odpowiedz układu musi dążyć do ustalonej wartości. Istnieje wiele metod pozwalających sprawdzić stabilność. Jedna z nich opiera się na sprawdzeniu znaków wszystkich pierwiastków wielomianu charakterystycznego układu (mianownika transmitancji operatorowej). Jeśli wszystkie pierwiastki są ujemne, to układ będzie stabilny.
Układy regulacji można podzielić na dwie grupy:
Układ regulacji nadążnej, w którym sygnał wyjściowy musi idealnie oddawać sygnał wartości zadanej
Układ regulacji zakłóceniowej, w której sygnał wyjściowy musi być niewrażliwy na zakłócenia.
Pożądana jakość regulacji zależy od doboru nastaw wybranego regulatora. Jedna z podstawowych metod doboru opiera się na znajomości parametrów obiektu i wybraniu odpowiedniego kryterium jakości regulacji. W przypadku rzeczywistego obiektu z dołączonym regulatorem stosuje się metody doświadczalne.
Model o znanej transmitancji
W tabeli 2.3 pokazany jest sposób doboru typu regulatora w zależności od charakterystyki skokowej obiektu.
Wzory służące do wyliczenia nastaw regulatorów dla obiektów statycznych i astatycznych minimalizujące odpowiednie kryteria całkowe podano w tabeli 3.4. Parametrami decydującymi o wartościach nastaw są: stosunek T0/TZ oraz k lub k0 wyznaczone na podstawie transmitancji zastępczej obiektu:
Statycznego
 (29)
(29)
Astatycznego
 (30)
(30)
| Lp. | Wartość regulowana | Charakterystyka skokowa obiektu | Typy regulatora | ||
| Zaleca-ny | Dopusz-czalny | Niedoz-wolony | |||
| 1 | Poziom cieczy
(obiekt całkujący) | 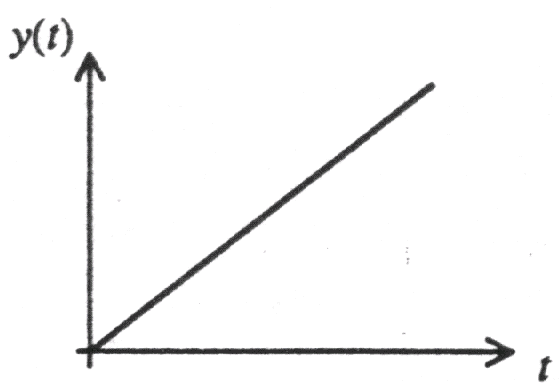 | PI | I | |
| 2 | Przemieszczenia siłownika tłokowego (obiekt całkujący z inercją) | 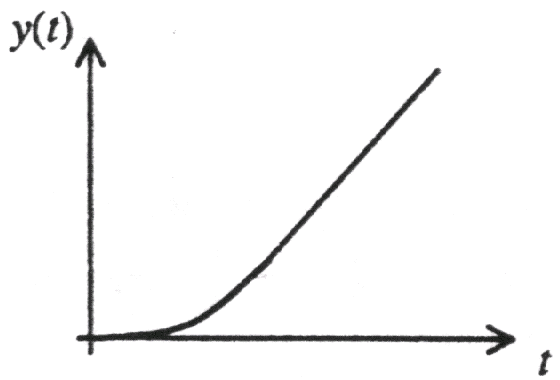 | PID | I | |
| 3 | Ciśnienie, prędkość kątowa (obiekt inercyjny pierwszego rzędu) | 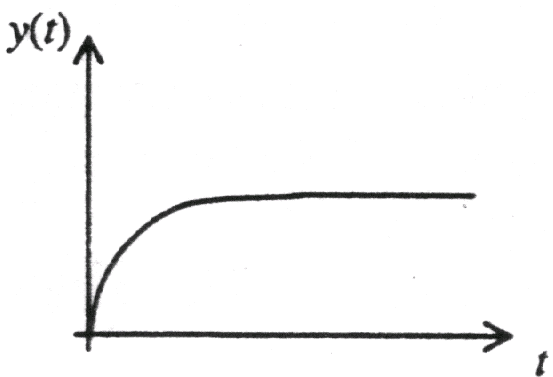 | PI | I | |
| 4 | Temperatura (obiekt inercyjny z opóźnieniem) | 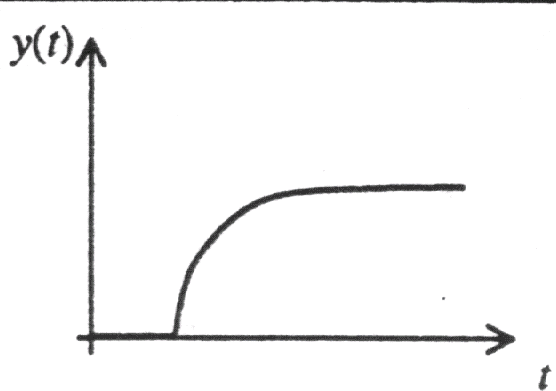 | PID | I, PI | P, PD |
| 5 | Temperatura (obiekt inercyjny wyższego rzędu) |  | PID | I, PI | P, PD |
| 6 | Wydajność taśmociągu (obiekt opóźniający) |  | PI | I | P, PD |
Tabela 2.4. Wartości nastaw oraz wskaźniki jakości regulacji dla układów regulacji z obiektami statycznymi i astatycznymi. 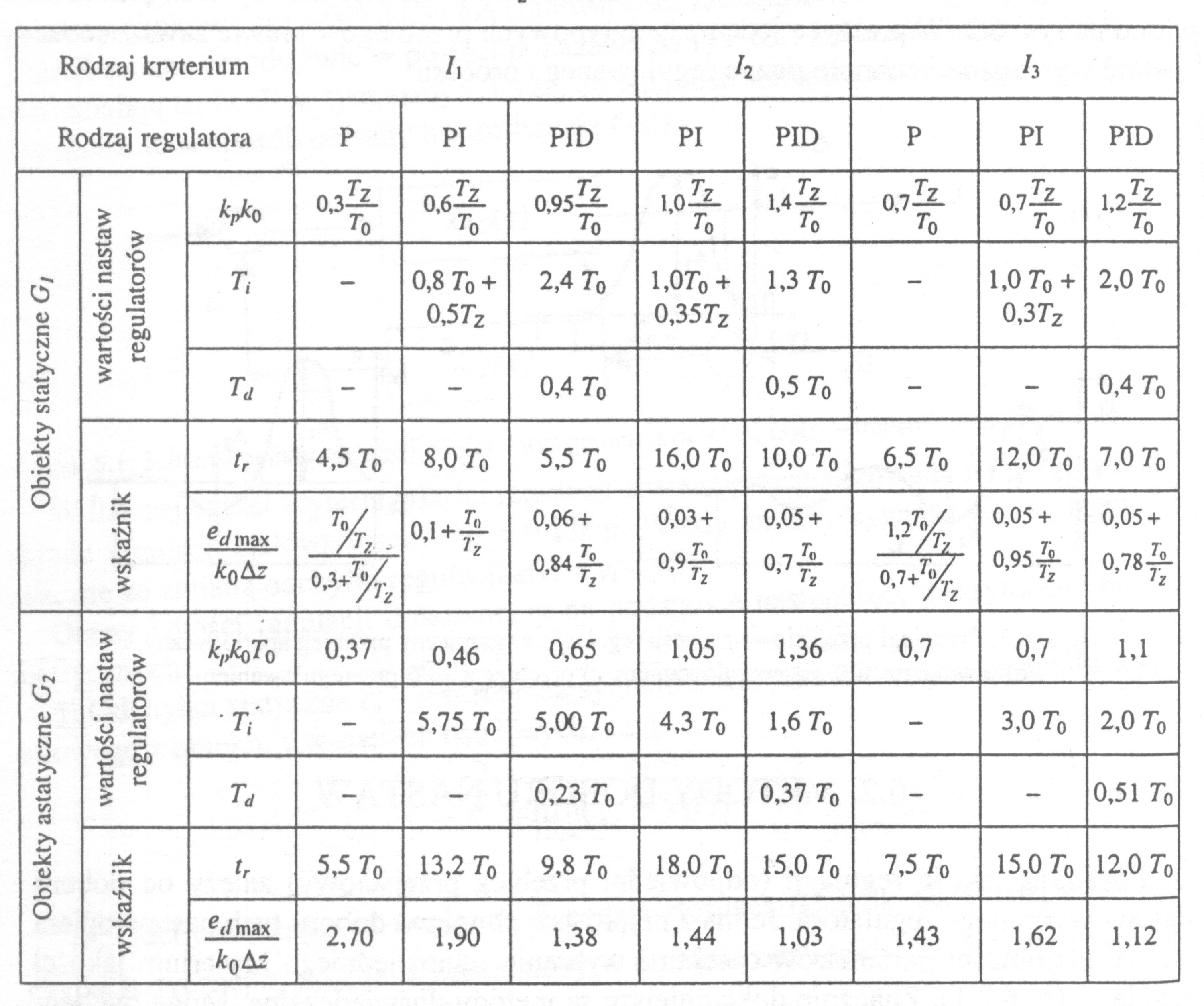
Wartości nastaw regulatorów obliczone na postawie tabeli 2.4 będą optymalne tylko wówczas, gdy transmitancja rzeczywista obiektu będzie identyczna z jego transmitancją zastępczą.
Wartości nastaw regulatorów zależą również od rodzaju układu regulacji.
Model o nieznanej transmitancji
W przypadku nieznajomości charakterystyki skokowej obiektu wartości nastaw regulatorów określa się doświadczalno – analityczną metodą Zieglera – Nicholsa. Polega ona na określeniu okresu Tkr nietłumionych oscylacji wielkości regulowanej y(t) w układzie regulacji z regulatorem typu P (rysunek 2.19). Regulując wartość współczynnika wzmocnienia kp, należy doprowadzić układ do granicy stabilności, tzn. oscylacje wielkości wyjściowej powinny mieć stałą amplitudę. Wówczas należy wyznaczyć krytyczny okres drgań Tkr oraz wzmocnienie krytyczne kpkr regulatora P przy którym wystąpiły oscylacje.
![]()
![]()
![]()
![]()
![]()
Rysunek 2.19. Przebieg przejściowy krytyczny (oscylacyjny nietłumiony).
Zalecane nastawy regulatorów są następujące:
Regulator P kp = 0,5kpkr (31)
Regulator PI kp = 0,45kpkr Ti = 0,85Tkr (32)
Regulator PID kp =0,6kpkr Ti = 0,5Tkr Td = 0,12Tkr (33)
komentarze
Dziękuję za zamieszczone tu informacje ;]
skomentowano: 2012-11-10 13:58:22 przez: student_automatyki
skomentowano: 2022-02-20 18:05:04 przez: student automatyki 2
Nie wiem co ja robie na tym kierunku xDD
skomentowano: 2022-02-20 18:05:38 przez: student automatyki 2
skomentowano: 2022-02-20 18:07:45 przez: student automatyki 3
skomentowano: 2022-02-20 18:08:41 przez: student automatyki 4
Copyright © 2008-2010 EPrace oraz autorzy prac.