
Typy podstawowych modeli procesów przemysłowych
Właściwości dynamiczne każdego obiektu można opisać za pomocą równań wiążących sygnał wyjściowy y(t) z sygnałem wejściowym x(t). Mają one najczęściej postać równania różniczkowego zwyczajnego liniowego. Równania te stanowią pierwotny opis właściwości dynamicznych obiektu i są podstawą do ich podziału. Wyróżnia się następujące człony podstawowe:
1 – proporcjonalny,
2 – inercyjny I rzędu,
3 – różniczkujący,
4 – całkujący,
5 – oscylacyjny,
6 – opóźniający.
Poniższa tabela zawiera zestawienie członów dynamicznych wraz z równaniami różniczkowymi, transmitancją operatorową oraz odpowiedzią skokowa.
Tabela 2.1. Zestawienie podstawowych członów dynamicznych.
Charakterystyki czasowe modeli
Wyznaczenie charakterystyki czasowej polega na pomiarze odpowiedzi obiektu spowodowaną standardową zmianą wielkości wejściowej. Najczęściej stosowanym wymuszeniem jest skok jednostkowy, a wyznaczona w ten sposób odpowiedź nosi nazwę charakterystyki skokowej obiektu. Przed wprowadzeniem wymuszenia skokowego badany obiekt musi znajdować się w stanie ustalonym, a wielkość skoku wymuszenia powinna wynosić 5 – 15 % zakresu dopuszczalnych zmian wielkości wejściowej. Otrzymaną odpowiedź obiektu y(t) można zapisać :
y(t)=h(t) – h(t - ti) (1)
gdzie h(t) – oznacza odpowiedź obiektu na wymuszenie skokowe o amplitudzie ∆u
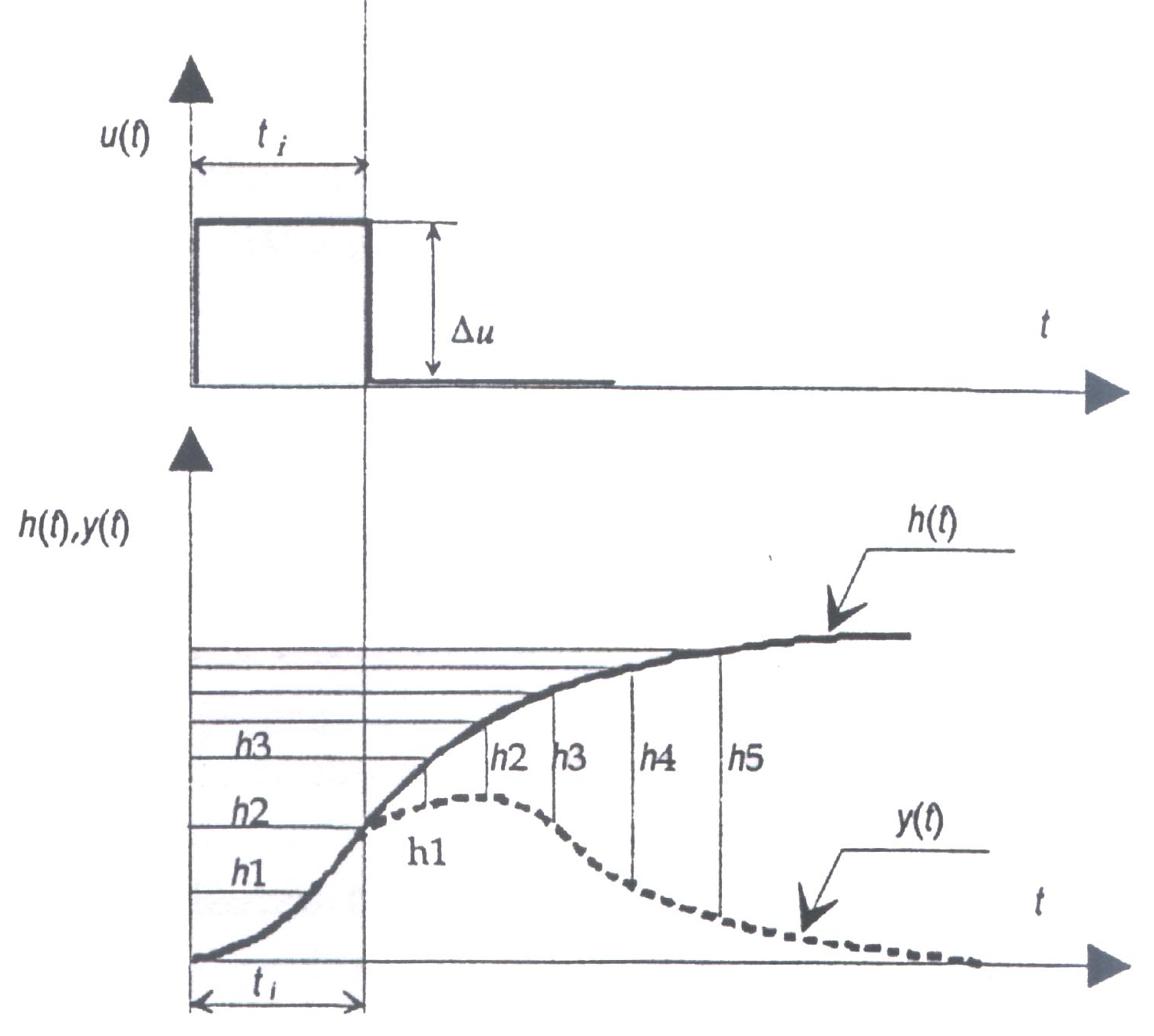
Rysunek 2.1. Wyznaczanie odpowiedzi skokowej na podstawie odpowiedzi na wymuszenie impulsem prostokątnym.
Konstrukcję graficzną odpowiadającą zależności (1) przedstawiono na rysunku 2.1. Do chwili t = ti przebieg y(t) i charakterystyka h(t) pokrywają się. Dla następnych chwil (t > ti) do przebiegu y(t) należy dodawać wartości h z odpowiednich chwil poprzednich (t – ti). Zaleca się aby amplituda ∆u wymuszenia impulsowego wynosiła 15 – 25% zakresu zmian wielkości u.
Ze względu kształt charakterystyki skokowej obiekty termoenergetyczne można podzielić na dwie grupy:
- obiekty z wyrównaniem (statyczne),
- obiekty bez wyrównania (astatyczne).
Po upływie dostatecznie długiego czasu odpowiedź skokowa obiektu z wyrównaniem osiąga nowy stan ustalony. Transmitancje zastępcze tych obiektów zawierają człony inercyjne i ewentualnie człon opóźniający.
Odpowiedz skokowa obiektu bez wyrównania wzrasta nieograniczenie, nie osiągając stanu ustalonego. Ich transmitancje zastępcze reprezentują szeregowe połączenie członu całkującego z członami inercyjnymi i ewentualnie członem opóźniającym.
Obiekty z wyrównaniem
Typową odpowiedz skokową obiektu z wyrównaniem przedstawiono na rysunku 2.2
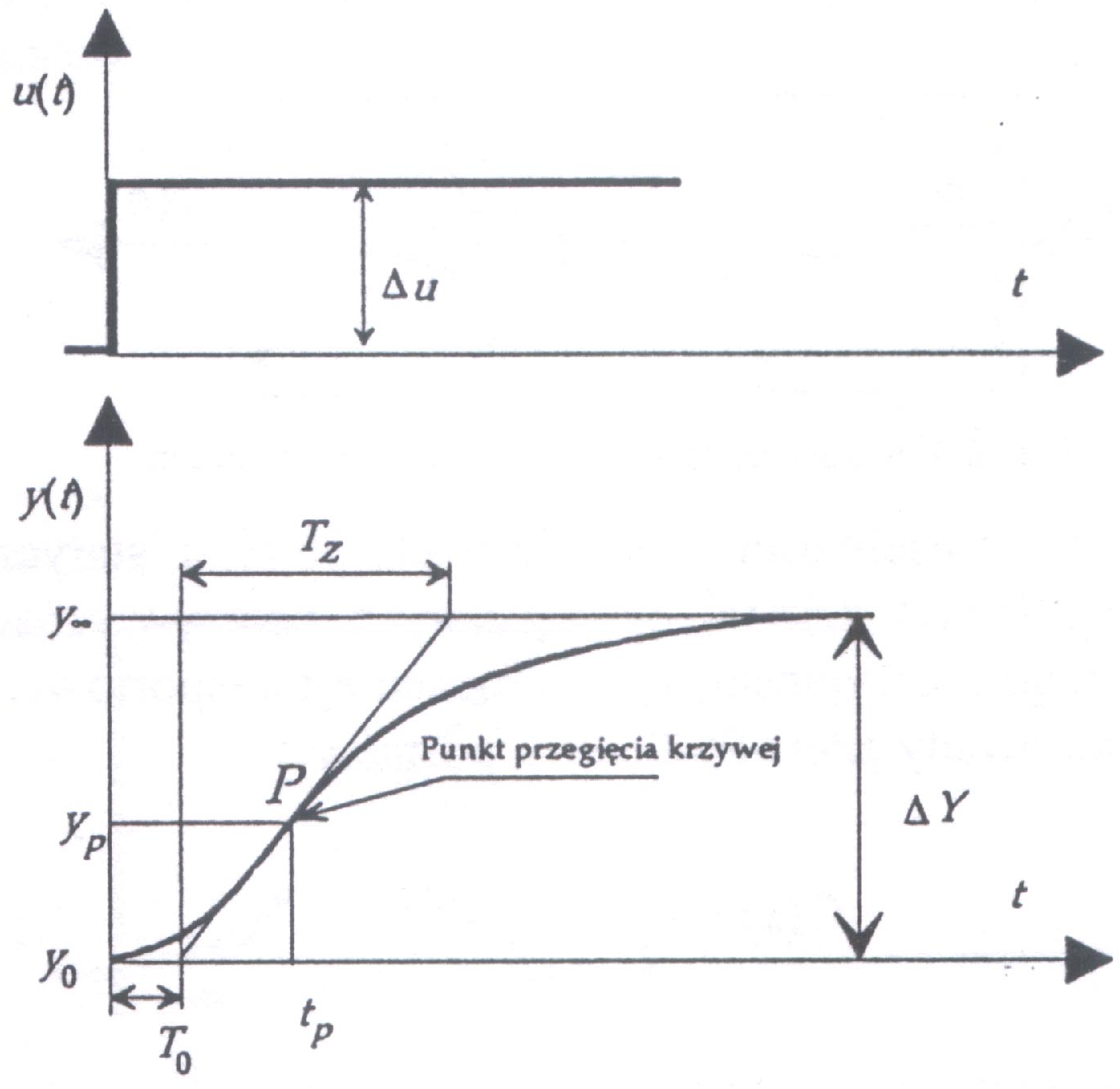
Rysunek 2.2. Charakterystyka skokowa obiektu z wyrównaniem.
Na podstawie tego wykresu można zdefiniować dwa przedziały czasowe:
T0 – zastępcze opóźnienie obiektu,
Tz – zastępcza stała czasowa obiektu.
Dodatkowo należy wyznaczyć współczynnik wzmocnienia obiektu
 (2)
(2)
Otrzymane wyniki pozwalają przyporządkować obiektowi model zastępczy złożony z połączonych szeregowo członów: inercyjnego I rzędu i opóźniającego, co przedstawiono na rysunku 2.3.
Rysunek 2.3. Model zastępczy obiektu z wyrównaniem.
Transmitancja operatorowa obiektu z wyrównaniem ma postać:
 (3)
(3)
gdzie
 (4)
(4)
to transmitancja członu inercyjnego, a
 (5)
(5)
to transmitancja członu opóźniającego.
Obiekty bez wyrównania
Charakterystyka obiektu bez wyrównania przedstawiona jest na rysunku 2.4
Rysunek 2.4. Charakterystyka skokowa obiektu bez wyrównania.
Transmitancje operatorowe obiektów bez wyrównania przedstawiają zależności:
 (6)
(6)
 (7)
(7)
T0 – jest to zastępcze opóźnienie obiektu,
Tc – wyznaczamy z zależności:
 (8)
(8)
komentarze
Copyright © 2008-2010 EPrace oraz autorzy prac.